Robot Soccer Vision#
$ cat projects/robot-soccer-vision.md
Real-Time Vision for Autonomous Robot Soccer
Five Aldebaran NAO robots per side. An Intel Atom E3845 CPU with 4GB of RAM. No cloud, no GPU worth mentioning, and a 33ms budget per frame — because the perception loop shares time with motion, localization, and coordination. That’s the hardware constraint in the RoboCup Standard Platform League.
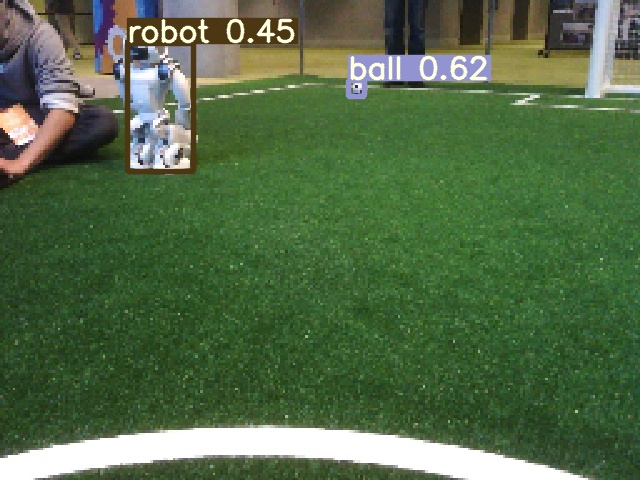
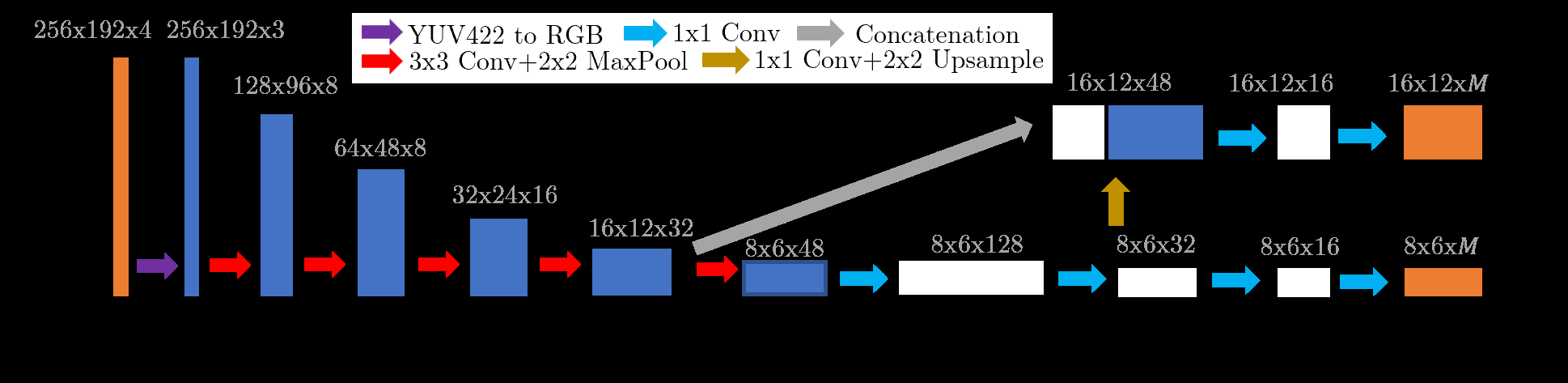
We built an end-to-end object detection pipeline that runs at 35 Hz on this hardware. The key was aggressive architecture search: we benchmarked YOLO and SSD variants, stripping them down to micro-scale networks (xYOLO-pico, xYOLO-nano) and running inference through TFLite with XNNPack optimizations. The top camera runs a full multi-class detector (ball, robots, crosses) at 98.7% mAP; the bottom camera runs a stripped variant at 80x80 resolution.
We also built the data pipeline from scratch — annotating thousands of frames from competition logs using CVAT, with Efficient-Det D7 providing seed labels to speed up manual annotation. Three datasets, mosaic augmentation, photometric transforms for lighting robustness.
UT Austin Villa placed top-5 twice at the international competition. This project shaped how I think about deploying AI: if it can’t run in real time on bad hardware under adversarial conditions, it doesn’t ship.
$ cat /etc/motd
// …built with Claude Code. based on data, but verify.
$ cd ~